
ブロック説明
前進コマンドブロック
 ロボットが向いている方向に、前進を命令するコマンドブロックです。
ロボットが向いている方向に、前進を命令するコマンドブロックです。数字をクリックして、前進する距離を1~8マス(1,2,3,4,8)の範囲で選択できます。
右進コマンドブロック
 ロボットが向いている方向に対し、右方向に横歩きを命令するコマンドブロックです。
ロボットが向いている方向に対し、右方向に横歩きを命令するコマンドブロックです。
数字をクリックして、横歩きする距離を1~8マス(1,2,3,4,8)の範囲で選択できます。
左進コマンドブロック
 ロボットが向いている方向に対し、左方向に横歩きを命令するコマンドブロックです。
ロボットが向いている方向に対し、左方向に横歩きを命令するコマンドブロックです。
数字をクリックして、横歩きする距離を1~8マス(1,2,3,4,8)の範囲で選択できます。
回転コマンドブロック
 ロボットが現在向いている方向を[0°]とし、[右45°][右90°][右135°][左45°][左90°][左135°][180°]の7方向に向きを変えるコマンドブロックです。三角形部分をドラッグして回転させる方向を設定します。
ロボットが現在向いている方向を[0°]とし、[右45°][右90°][右135°][左45°][左90°][左135°][180°]の7方向に向きを変えるコマンドブロックです。三角形部分をドラッグして回転させる方向を設定します。
繰り返しコマンドブロック
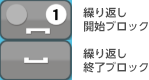 動作を命令するコマンドブロックの前後を「繰り返し始め」と「繰り返し終り」ではさむと、はさんだ動作を繰り返し実行します。
動作を命令するコマンドブロックの前後を「繰り返し始め」と「繰り返し終り」ではさむと、はさんだ動作を繰り返し実行します。
1~8(1,2,3,4,8)の数字をクリックして、繰り返し実行する回数を選択します。
繰り返しの実行中は右上に実行された回数が表示されます。
「繰り返し始め」と「繰り返し終り」は必ずペアで使用し、正しく使用されていないときは「ループが正しくありません。」と表示されます。(実際のプログラミングでも「ループ」と呼ばれ、重要なコマンドのひとつです)
並列接続
 前進コマンドブロックと右進コマンドブロックなど、2つのコマンドブロックを横に接続すると、その合成方向(ベクトル方向)にロボットを進ませることができます。
前進コマンドブロックと右進コマンドブロックなど、2つのコマンドブロックを横に接続すると、その合成方向(ベクトル方向)にロボットを進ませることができます。
例えば、左進3マス、上進4マスの場合は図のように進みます。
もし、続けてロボットを動かす場合は、左列にならべます。
ブロックが「青く変化」しない場合は、間違った場所にブロックが置かれています。
©JEITA.All Rights Reserved.
